Achieving expert-like robotic task execution in dynamic environments typically requires extensive,
high-quality
expert demonstrations, a significant bottleneck for real-world deployment. We present a novel learning
framework
that overcomes this data dependency, enabling robots to perform complex periodic tasks with expert-like
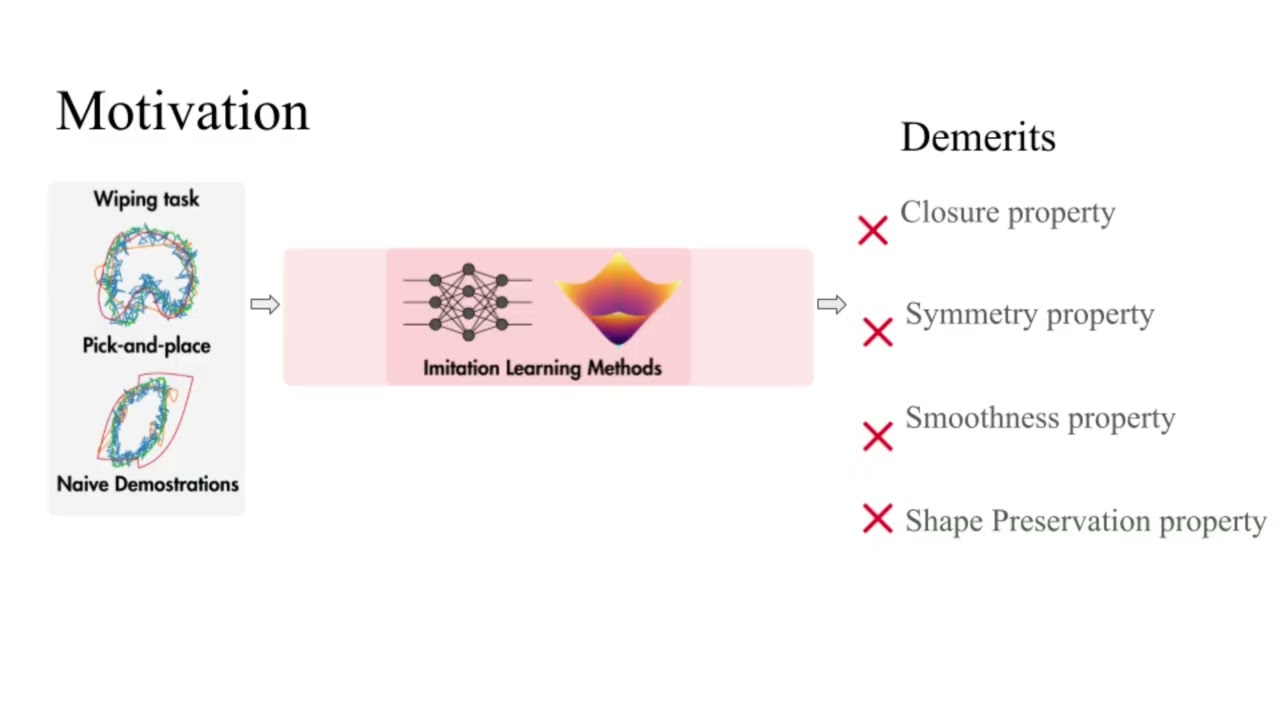
proficiency, even when learning from naive demonstrations.
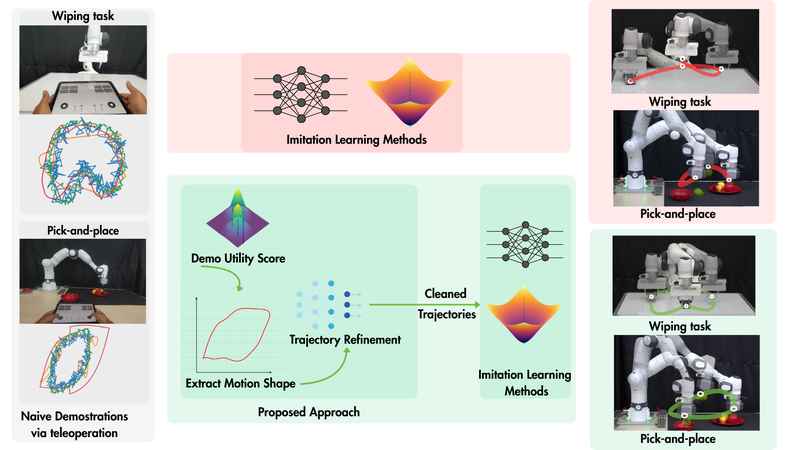
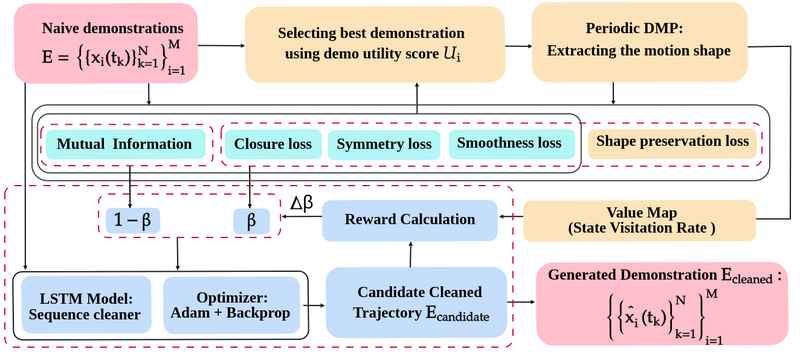
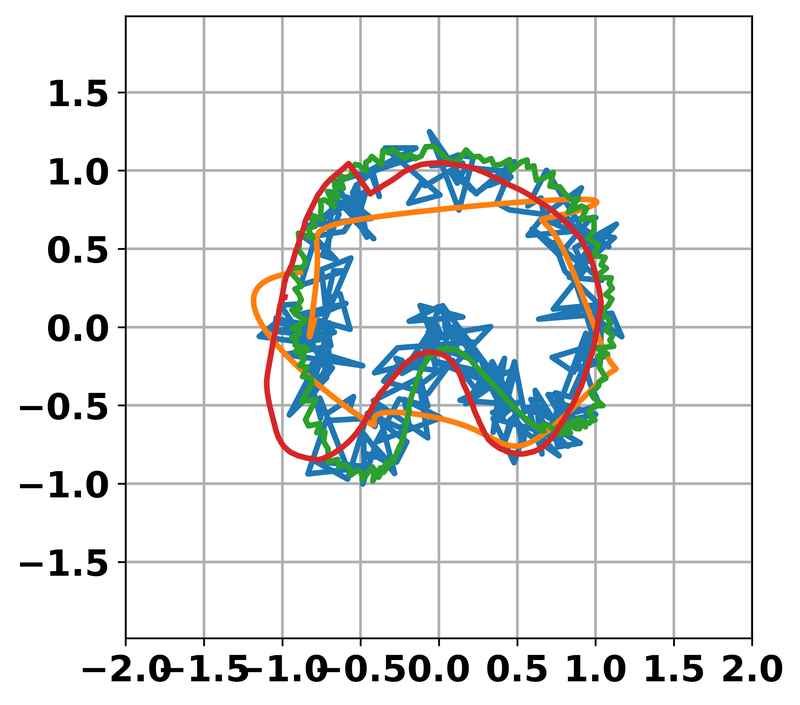
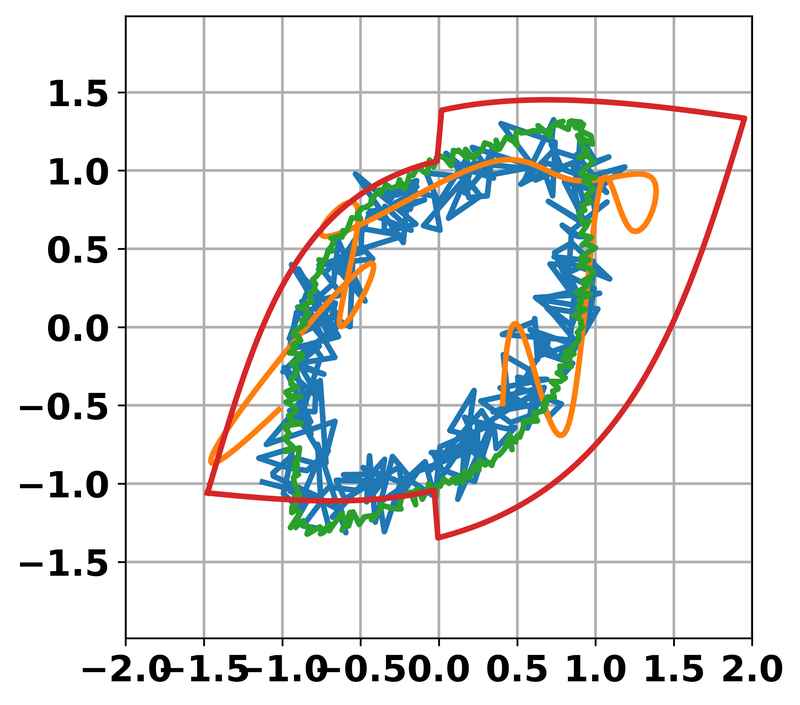
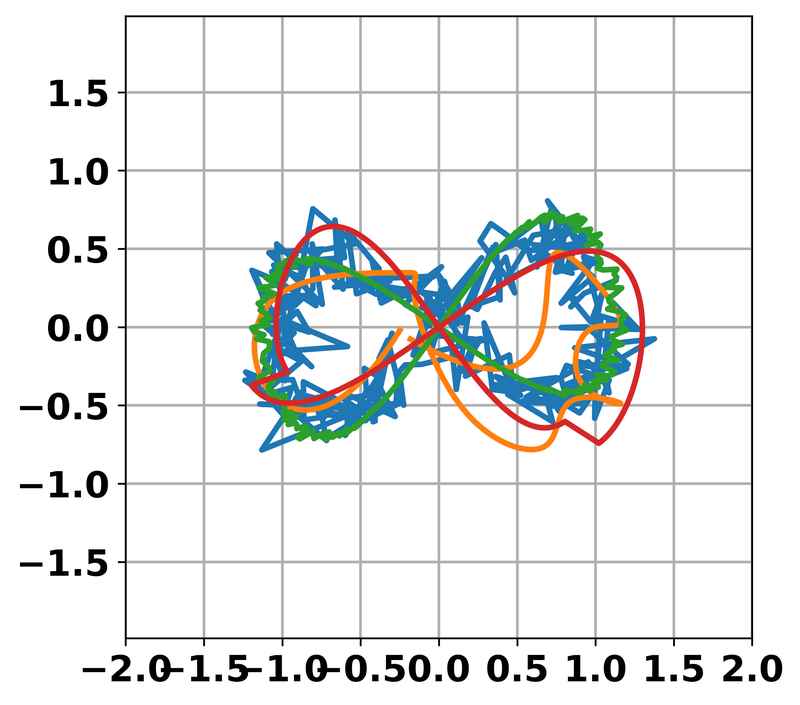
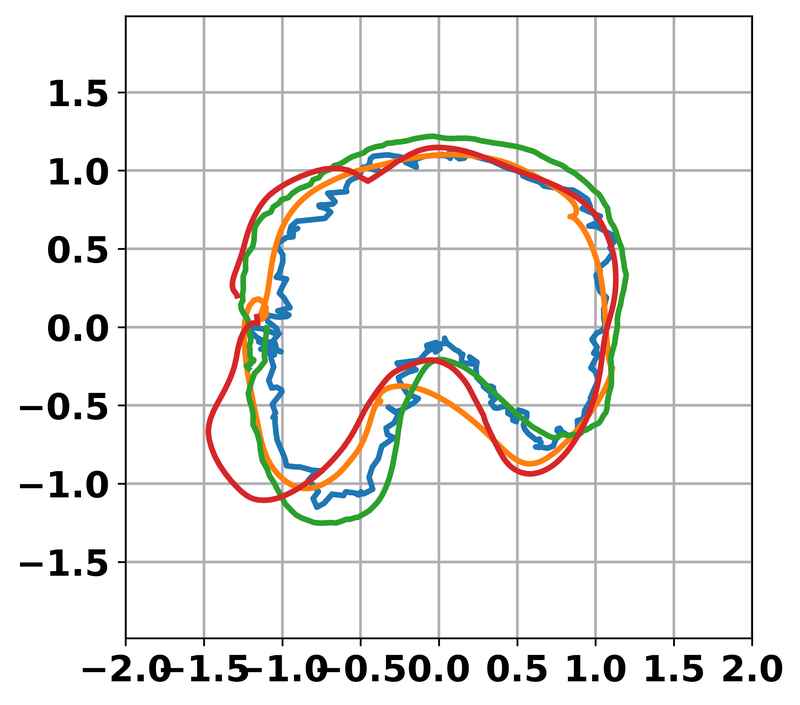
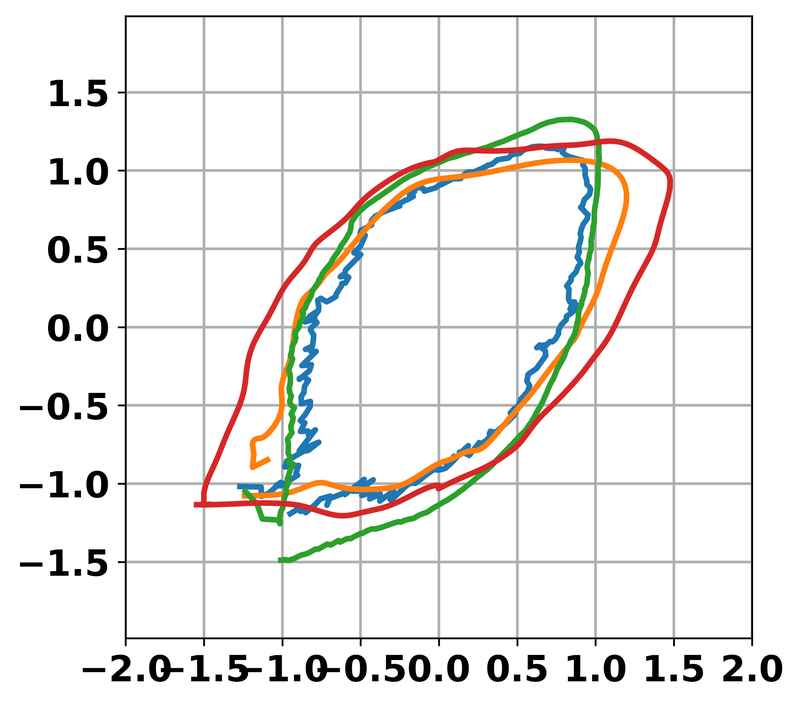
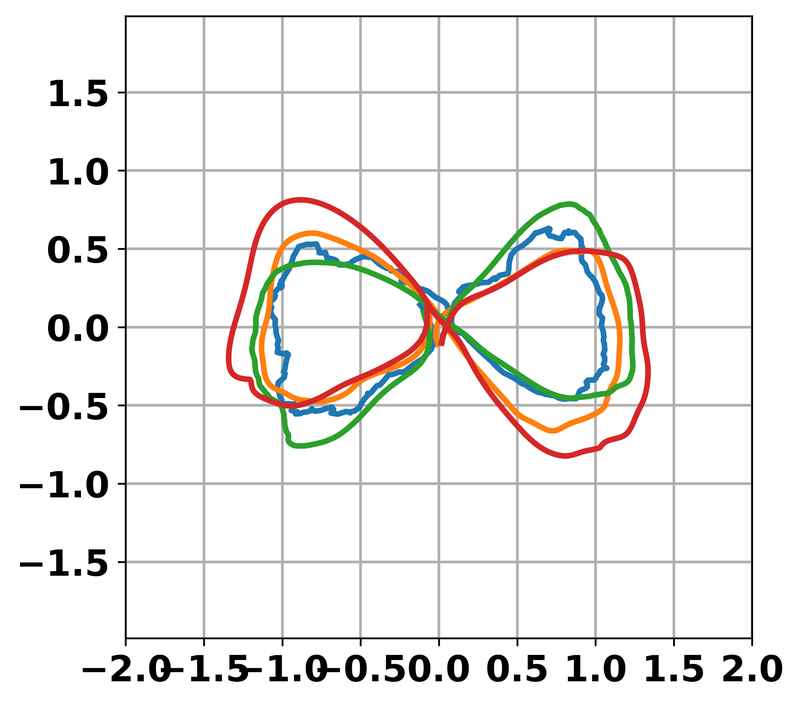
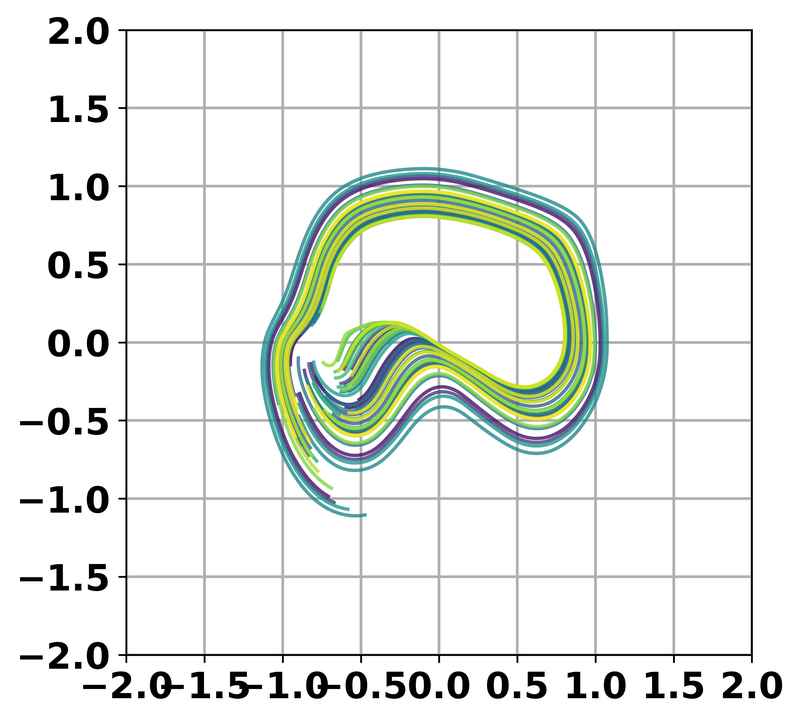
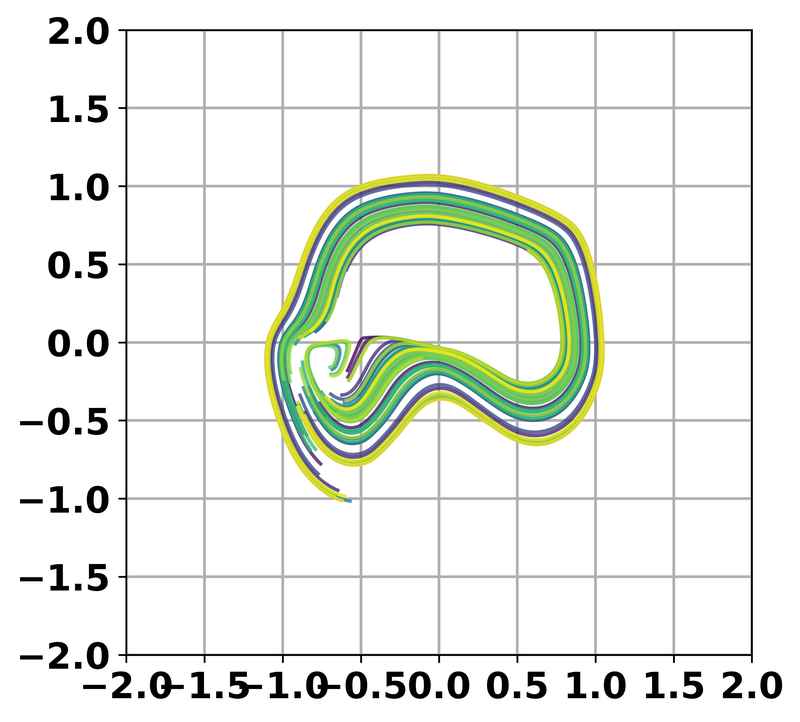
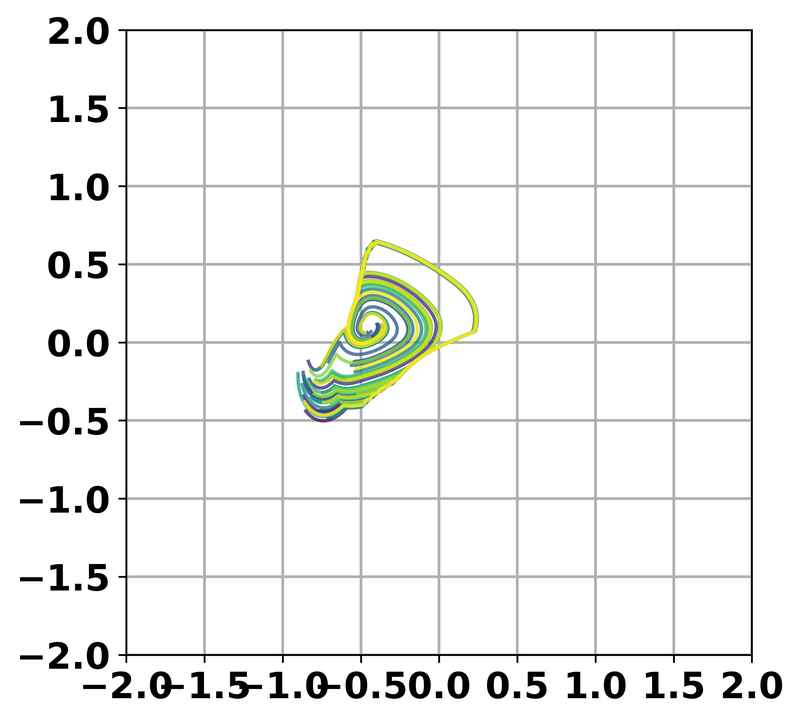
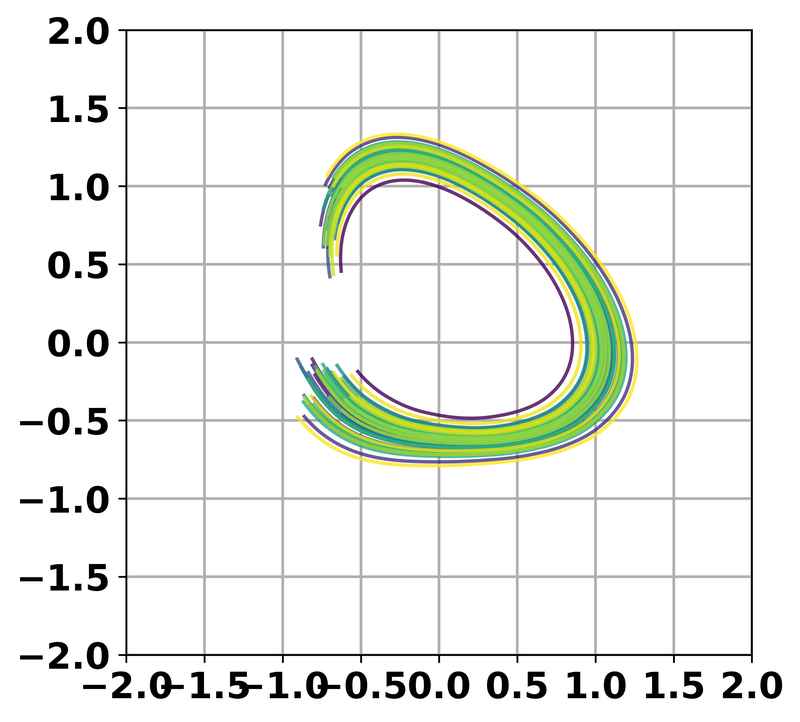
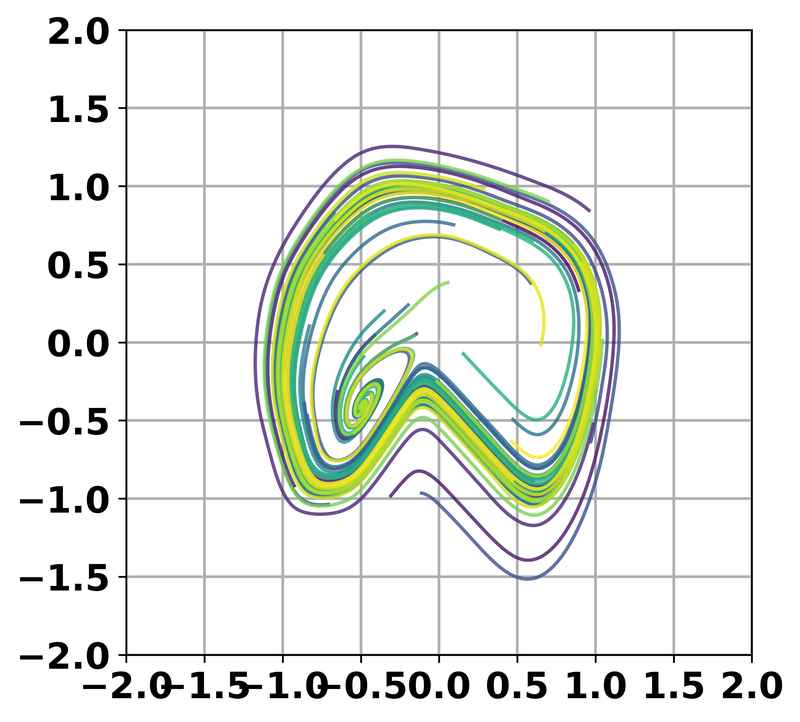
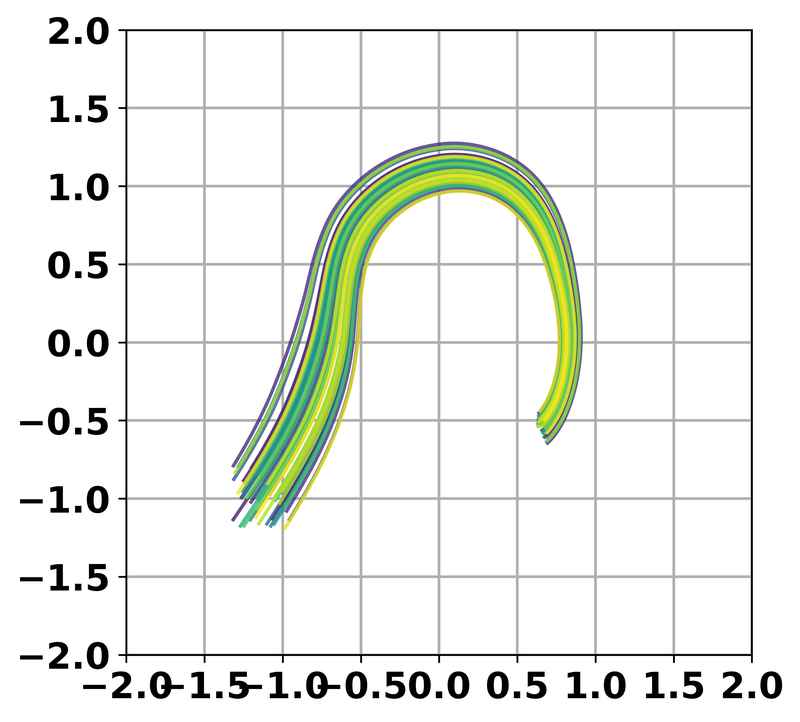
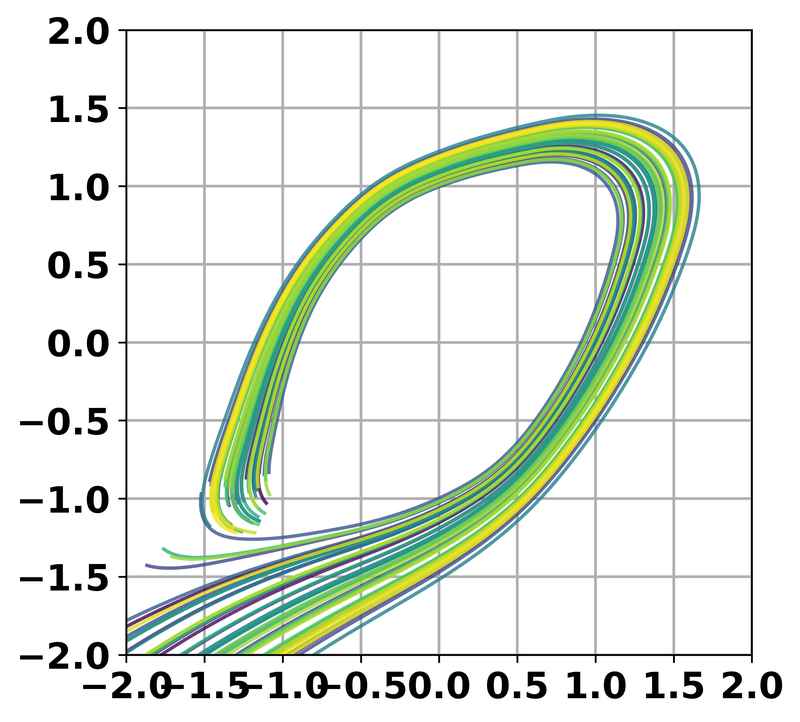
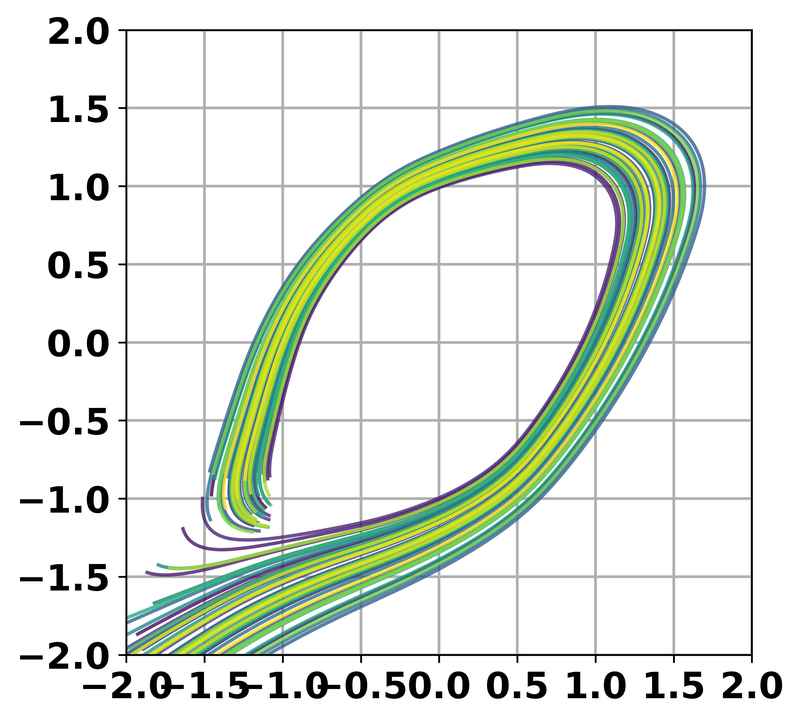
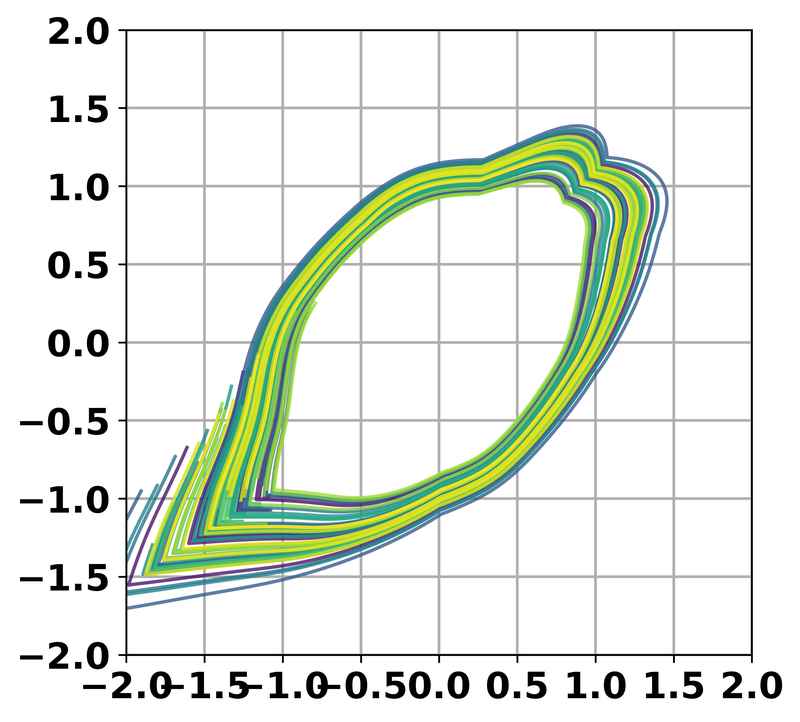
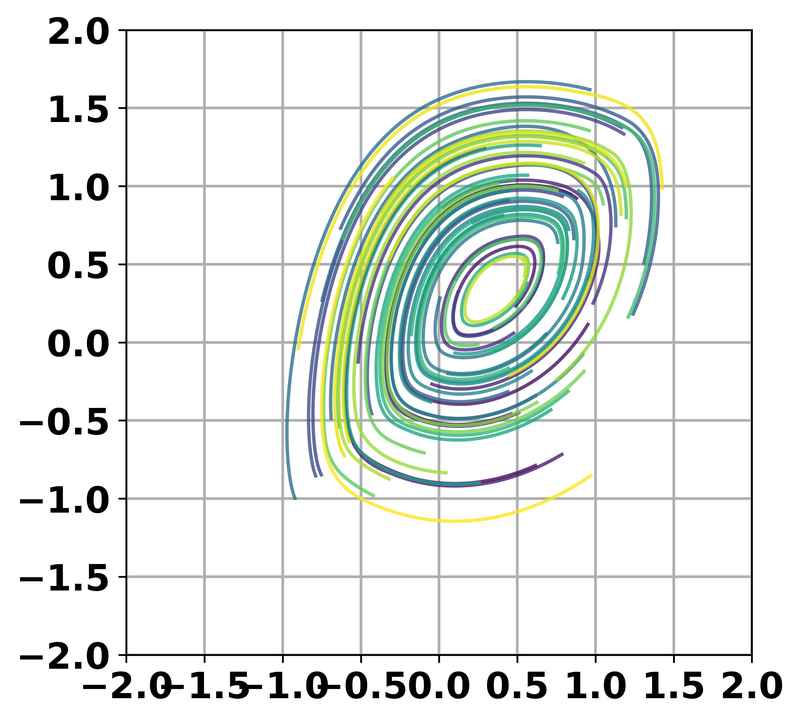
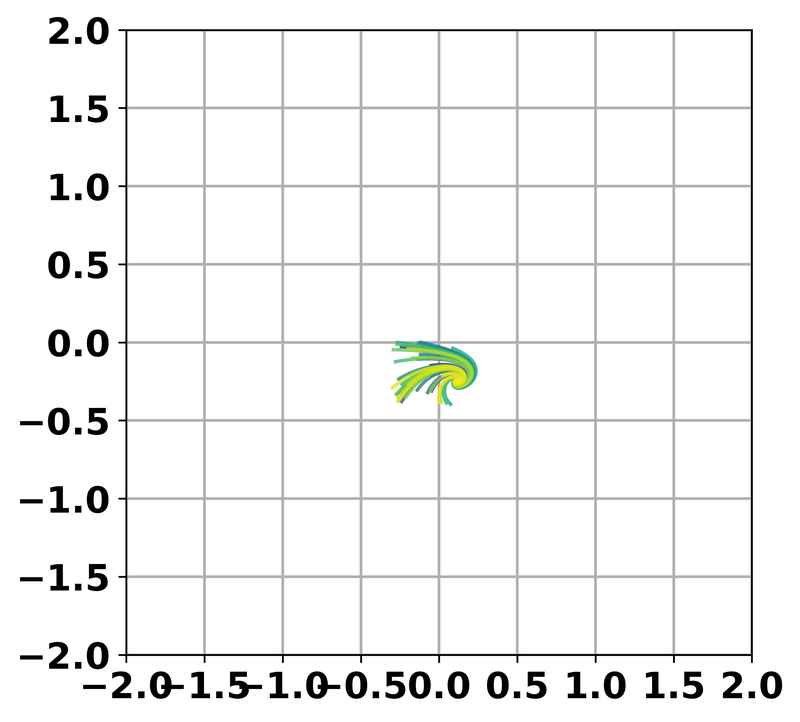
Our two-stage pipeline first selects a representative demonstration based on user-defined information-aware
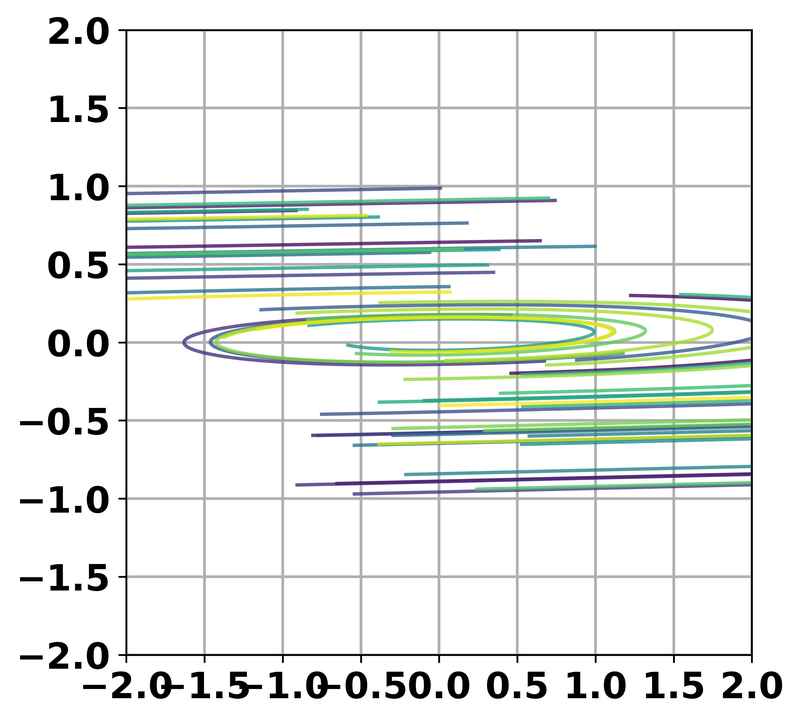
task intention scores. This single best demo is then used to extract a canonical motion shape via Periodic
Dynamic Movement Primitives (DMPs). Finally, a Long Short-Term Memory (LSTM) network refines the entire set
of demonstrations, leveraging a multi-objective score that combines the canonical shape with mutual
information
and other task quality metrics.
The proposed approach is demonstrated on a Franka Research 3 robot performing phasic tasks across three
contrasting domains: wiping in human assistive services, weaving in the textile industry, and pick-and-place
operations for warehouse automation. Code available at:
https://github.com/FocasLab/ICRA-IL-2026.